LiDAR processing
Processing data from a laser scanner or LiDAR (Light Detection And Ranging) is carried out particularly using programs provided by the scanner manufacturer.
Trajectory calculation
To calculate the flight trajectory, the POSPac 8.7 software is used. It is followed by the conversion of trajectories in the Riegl – POFImport 1.8. software. The input data are GNSS and IMU data recorded at 200 Hz frequency. The output is a flight trajectory in the ETRS-89 system. For further processing in the SW RiPROCESS, we had to convert the trajectory in the POFImport program to the *.pof format.
Georeferencing
The following software from the company RIEGL Laser Measurement System GmbH is used to adjust the laser data:
RiPROCESS 1.9.2 – software for computations of adjustment of data from a laser scanner
RiUNITE – software for full waveform analysis and georeferencing of laser scanner data
GeoSysManager 2.2.4 – management of a database of coordinate systems and projections
Relative orientation of individual flight lines
As the input data for the adjustment of scanned flight lines serve the georeferenced data from an airborne scanner and calculated flight trajectories in the system ETRS-89 in *.pof format. First, reference tie planes are searched automatically in the Riprocess program, followed by the calculation of deviations between the same reference tie planes on different lines. Using the least squares method the deviations are minimized and simultaneously trajectory parameters for each single flight line are adjusted. In this way, the relative orientation process of each flight line is carried out. The laser data are then re-georeferenced using the adjusted trajectories.
Export
The resulting laser data are usually exported in the form of a point cloud (LAZ format, ETRS-89 UTM33N coordinate system) including the so-called Riegl extra bytes that assign information from full-waveform analysis (amplitude and pulse width) to each of the points.
Standard outputs
The common output is a georeferenced point cloud. If interested, point cloud can be processed into the Digital Surface Model (DSM), Digital Terrain Model (DTM) or Object Height Model also called normalized DSM (nDSM).
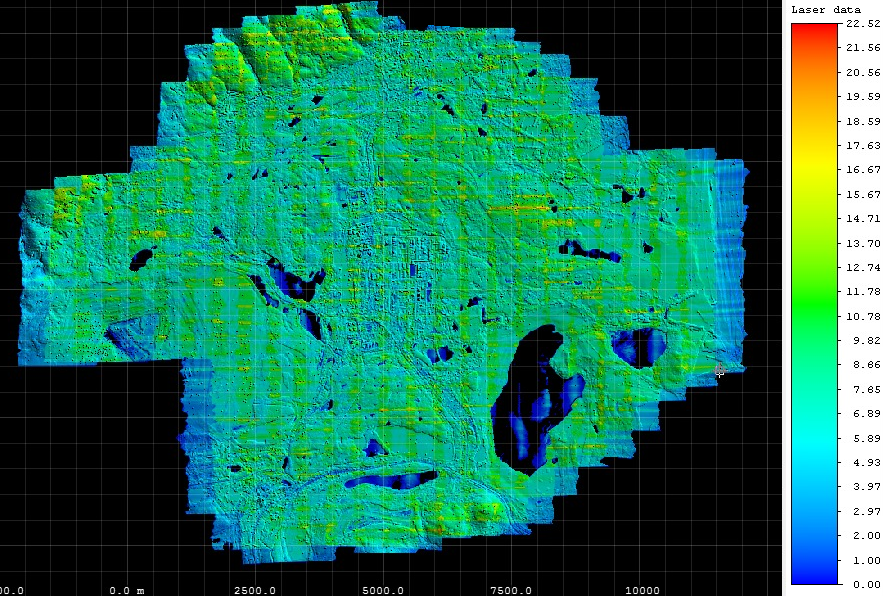
Preview of scanned laser data. The values represent the density of the points per 1 m2.