Zpracování dat z laserového skeneru
Zpracování dat z laserového skeneru neboli LiDARu (Light Detection And Ranging) probíhá zejména v programech dodaných výrobcem skeneru.
Výpočet trajektorie
K výpočtům trajektorie letu byl použit software software POSPac 8.7. Následovala konverze trajektorií v softwaru Riegl -POFImport 1.8. Vstupními daty byly GNSS a IMU údaje zaznamenávané s frekvencí 200 HZ. Výstupem byla trajektorie letu v systému ETRS 89. K dalšímu zpracování v SW RiPROCESS byla nutná konverze trajektorie v programu POFImport do formátu *.pofx.
Georeferencování
Pro urovnání laserových dat byl použit následující software od společnosti RIEGL Laser Measurement System GmbH:
RiPROCESS 1.9.2 – software k výpočtům urovnání dat z laserového skeneru
RiUNITE – software pro analýzu full waveform a georeferencování dat z laserového skeneru
GeoSysManager 2.2.4 – správa databáze souřadnicových systémů a projekcí
Relativní orientace jednotlivých letových linií
Vstupními daty pro urovnání nasnímaných letových linií jsou georeferencovaná data z leteckého skeneru a vypočítané trajektorie letů v systému ETRS-89 ve formátu *.pof. V programu Riprocess byly nejprve automatizovaně vyhledány referenční plochy. Následuje výpočet odchylek mezi stejnými referenčními plochami na různých liniích. Metodou nejmenších čtverců jsou odchylky minimalizovány a zároveň jsou upraveny parametry trajektorie pro každou jednotlivou letovou linii. Tímto způsobem je proveden proces relativní orientace jednotlivých letových linií. Laserová data jsou následně znovu georeferencována pomocí upravených trajektorií.
Export
Výsledná laserová data jsou obvykle exportována ve formě bodového mračna (formát LAZ, souřadnicový systém ETRS-89 UTM33N) včetně tvz. Riegl extra bytes, které ke každému bodu přiřazují informaci z full-waveform analýzy (amplitude a pulse width).
Standardní výstupy
Obvyklým výstupem je georeferencované bodové mračno. V případě zájmu je možno bodové mračno zpracovat do formátu Digitálního modelu povrchu (DSM), Digitálního modelu terénu (DTM) nebo modelu výšek objektů (nDSM).
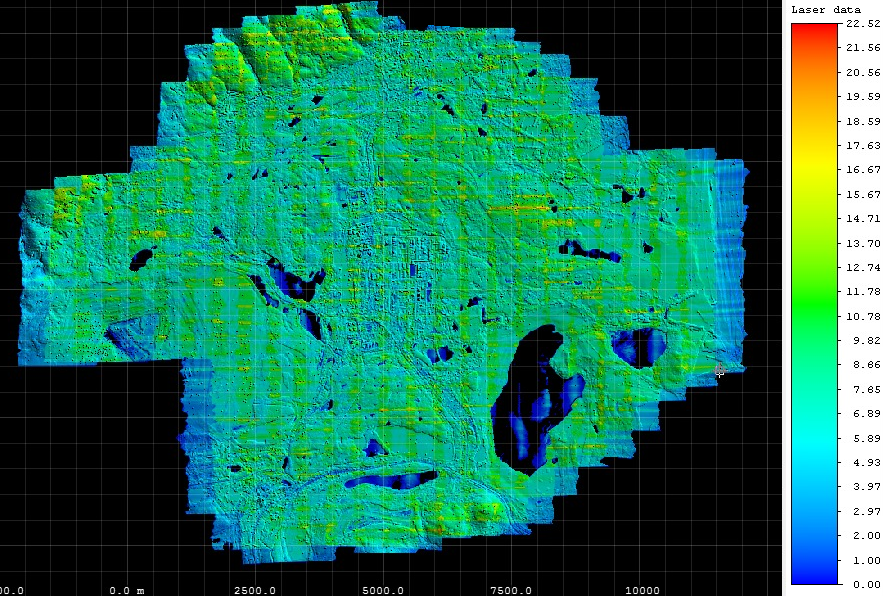
Náhled nasnímaných laserových dat. Hodnoty vyjadřují hustotu na 1 m2.